本指南是我們工業自動化中心的一部分,您可以在其中了解有關人工智能、自動化和控制的更多信息。
在本指南中,我們將介紹一些最熟悉和最受歡迎的機器人零部件類型,並確定一些不同的基本機器人類型以及它們在現代工業中往往扮演的角色類型。

本指南是我們工業自動化中心的一部分,您可以在其中了解有關人工智能、自動化和控制的更多信息。
在本指南中,我們將介紹一些最熟悉和最受歡迎的機器人零部件類型,並確定一些不同的基本機器人類型以及它們在現代工業中往往扮演的角色類型。

多年來,隨著工業機器人的複雜性和功能不斷發展,它們所擅長的非凡能力和角色範圍呈指數級增長。 與此同時,儘管技術在過去十年中不斷進步,機器人設計和構造中許多關鍵部件(尤其是傳感器)的製造成本開始大幅下降。 從工業角度來看,其結果是各個行業的機器人和機器人零件的可用性和可負擔性迅速擴大。 傳統手動生產過程中的機器人和機器人元件現在比以前更常見,即使是在較小規模的操作中,因為它們不再那麼昂貴,以至於僅適用於產量極高的企業,並且 營業額。
無論它們是極其複雜的機器還是相對簡單的機器,所有機器人基本上都由一些任何類型通用的關鍵部件組成。 簡而言之,在任何可編程工業機器人中總會有:
上面最後一個要點中提到的“對外部刺激的響應”是定義機器人和機器人部件與其他高科技組件的重要因素。 有趣的是,對於機器人本身的具體構成,目前還沒有真正達成非常標準化的共識,而機器人僅僅是能夠按照一致標準執行重複任務的機器。
識別我們廣泛認為的“機器人”的一個關鍵因素是機器自主感知環境的某些方面並做出反應的能力。 例如,不言而喻,我們通常不會將水壺視為機器人,即使它以一致的標準執行可重複的任務,並且我們的輸入最少(超出初始指令)。 許多類型的“智能”技術現在模糊了簡單機械和真正的機器人之間的界限,因為它們能夠監控和響應周圍環境中不斷變化的參數。 同樣,這在一定程度上是由於當今傳感器技術的製造比十年前更加廣泛和廉價。
正如上一節所述,無論安裝的機器的整體複雜性如何,機器人的核心部件在不同型號之間都相當一致。本質上,總會有:
以上當然是一個非常廣泛的類別列表。 在下面的部分中,我們將更具體地了解一些最常用的機器人部件,這些部件存在於部署在無數類型的工業和實驗室環境中的各種機器中。

機械臂是經過編程可以快速、高效且極其準確地執行特定任務或工作的機器。 它們通常由電機驅動,最常用於在較長時間內快速、一致地執行特別重型/精細和高度重複的程序。 它們在工業生產、製造、機械加工和裝配領域尤其受到重視。
大多數用於工業生產、裝配或拾放應用的機械臂都有 4-6 個鉸接關節,旨在模仿人類手臂和手的基本功能。 常見類型的工業可編程機器人手臂包括笛卡爾手臂、極坐標手臂、圓柱手臂和 SCARA 手臂,每種手臂都在不同形狀和協調的物理空間“包絡”內運行,以執行其主要任務 - 您可以閱讀有關這些手臂的更多信息 本指南末尾的機器人類型。

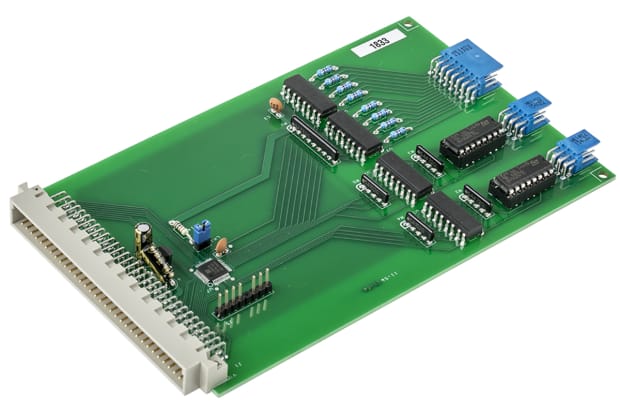
機器人控制器可以採取多種形式,但在現代工作場所使用中,它們幾乎總是涉及硬件和軟件的組合,它們共同形成數字計算機系統,通過該系統對機器人進行指令和監控。
如上所述,這裡最接近的人類類比是大腦——控制器創建和發送的信號直接管理所有其他機器人部件的運動,包括關節、操縱器和任何末端執行器附件。
從本質上講,機器人控制器使配備適當的機器成為機器人,特別是在與傳感器結合使用時,使其能夠根據外部事件和條件自動調整。
機器人控制系統大致分為兩大類,即:
預編程控制系統 更簡單的預編程機器人純粹是為了一遍又一遍地重複相同的基本操作而設計的,並且只能以非常有限的方式(如果有的話)對外部環境的變化做出反應。 換句話說,它們需要維持適當的條件才能正確執行其預期任務。
自主機器人控制系統 更複雜的自主機器人將配備一系列傳感器和其他設備,使它們能夠檢測和響應外部因素或環境變化。

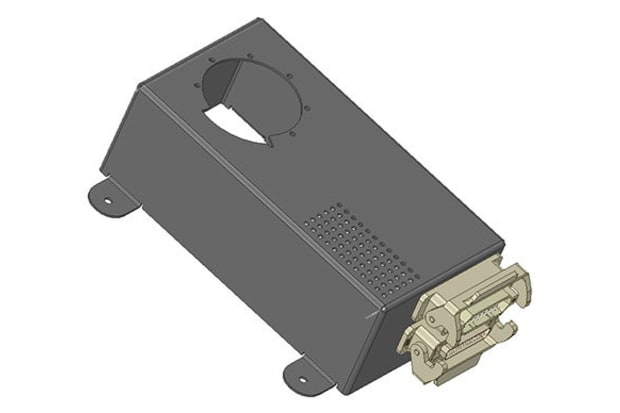
機器人夾具只是多種類型的機械手之一,可以安裝在機器人或機械臂的末端執行器(“手”)部分,以為其提供某些關鍵功能和能力。 機器人夾具為機器提供了一種實現各種物體和組件的可靠採購的方法,這對於大多數生產線、裝配和拾放應用至關重要。 它們通常被設計為電動、氣動或基於真空原理 - 與大多數機器人部件一樣,給定應用的最佳解決方案將取決於任務的精確性質和機器人所處環境的具體情況 被投入工作。
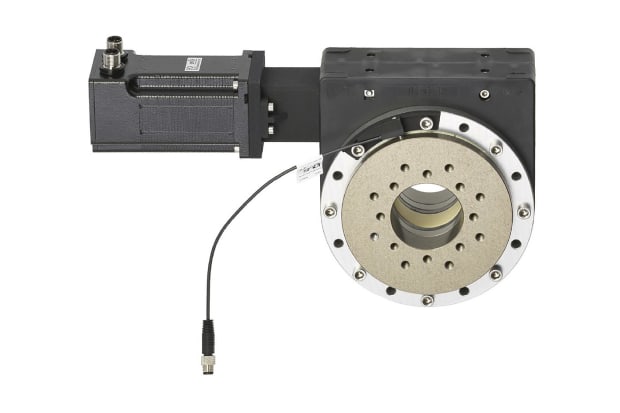
機器人關節和電機賦予了這些機器一次又一次執行極其精確、準確的可重複運動的寶貴能力。 有各種各樣的電機(也稱為執行器)可以從機器人供應商處購買,選擇正確的類型將取決於對有關您希望機器人能夠執行的運動類型和範圍的一些關鍵事實的考慮 履行。
可用的機器人電機的基本類型包括:

與人類的能力相比,機器人可以很容易地配備一系列傳感器、鏡頭和其他附加裝置,使它們能夠獲得許多與我們相同的基本感官——視覺、聽覺、觸覺等。 更棘手的問題是教機器人如何在接收到數據時理解和理解這些數據。
出售的各種機器人傳感器可分為各種關鍵類別,其中可能包括:
現代工業和工作場所使用許多不同類型的機器人。 在本節中,我們將了解一些更常見的類型,以及他們傾向於執行的角色類型。
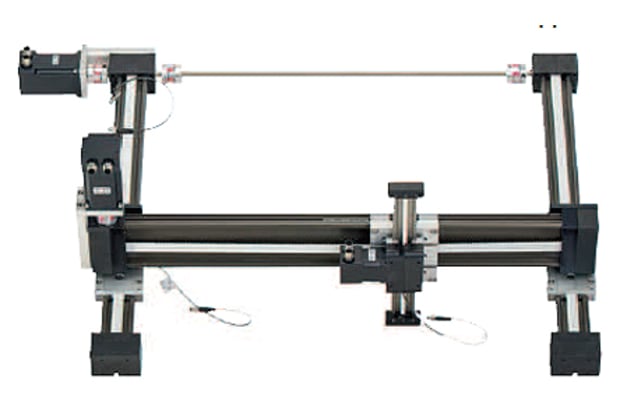
Cartesian 機器人之所以如此稱呼,是因為它們基於笛卡爾坐標系進行操作 - 換句話說,它們的運動是沿著我們在大多數圖形和 3D 圖表上看到的熟悉的 X、Y 和 Z 軸繪製和控制的。 他們通常執行機器加工或拾取和放置等任務。
因此,Cartesian或龍門機器人的關節和電機使用 X、Y 和 Z 坐標進行編程,以實現這三個維度的線性運動,有時還可以使用額外的旋轉腕關節來提高靈活性。 一系列線性執行器允許笛卡爾機器人在三維空間中精確定位工具或附件,並通過一系列線性運動操縱它在位置之間切換。